01
Vibrotactile Perception
Mapping the frequency, amplitude, and spatial limits of touch on the forearm and wrist.
Read more →




Vibrotactile interfaces. Spatial audio. Room acoustics.
Research that bridges perception science and engineering.
ACUTE is an interdisciplinary research group at the University of Iceland. We sit at the intersection of human perception science, engineering design, and applied acoustics.
We collaborate with prosthetics manufacturer Össur ehf., spatial audio company Treble Technologies, and clinicians at Landspítali — National University Hospital. Funded by RANNÍS, NordForsk, and the European Union.
Mapping the frequency, amplitude, and spatial limits of touch on the forearm and wrist.
Read more →
Vibrotactile sleeves that restore proprioception for transfemoral amputees.
Read more →
Devices that translate sound and vision into touch for visually and hearing-impaired users.
Read more →
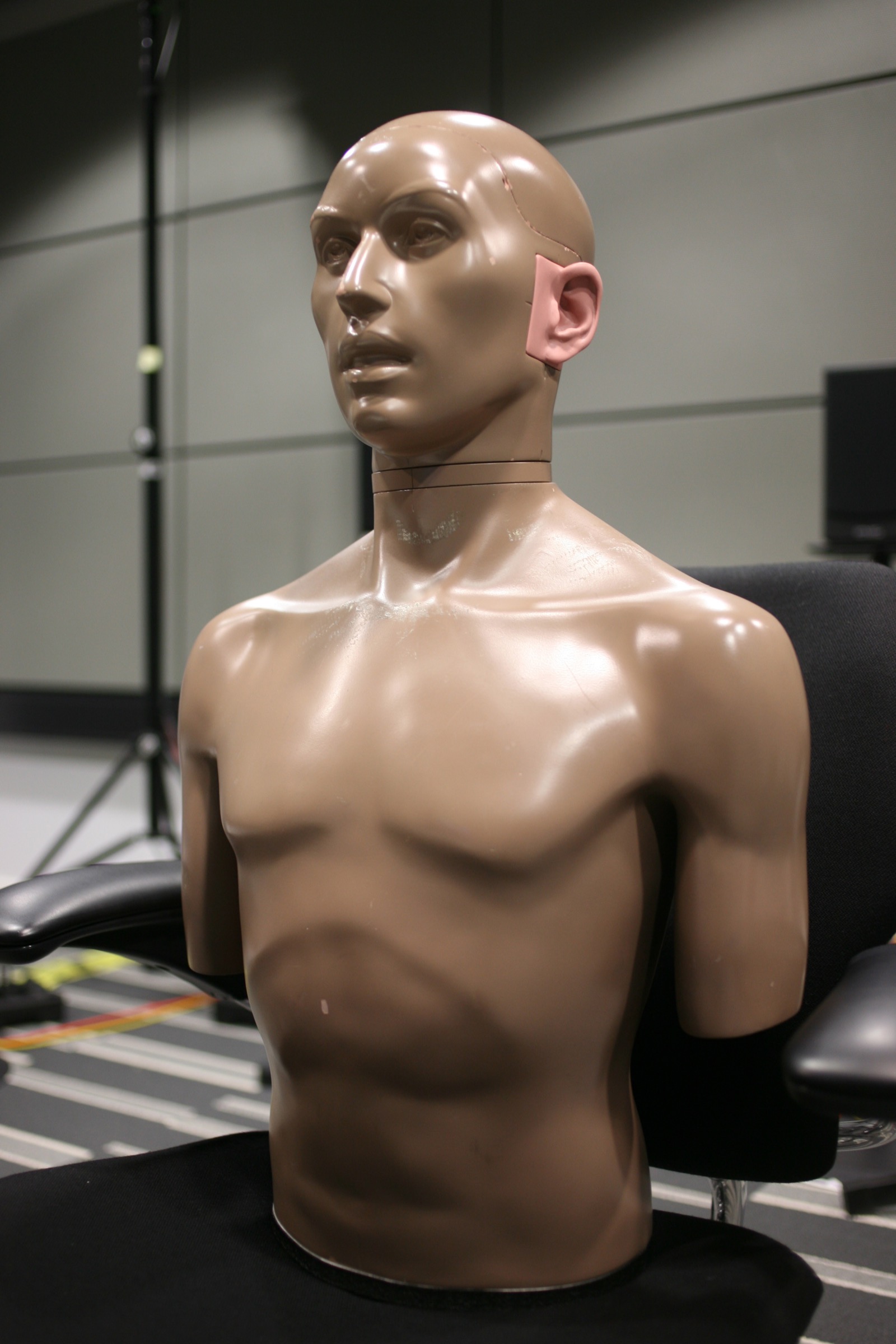
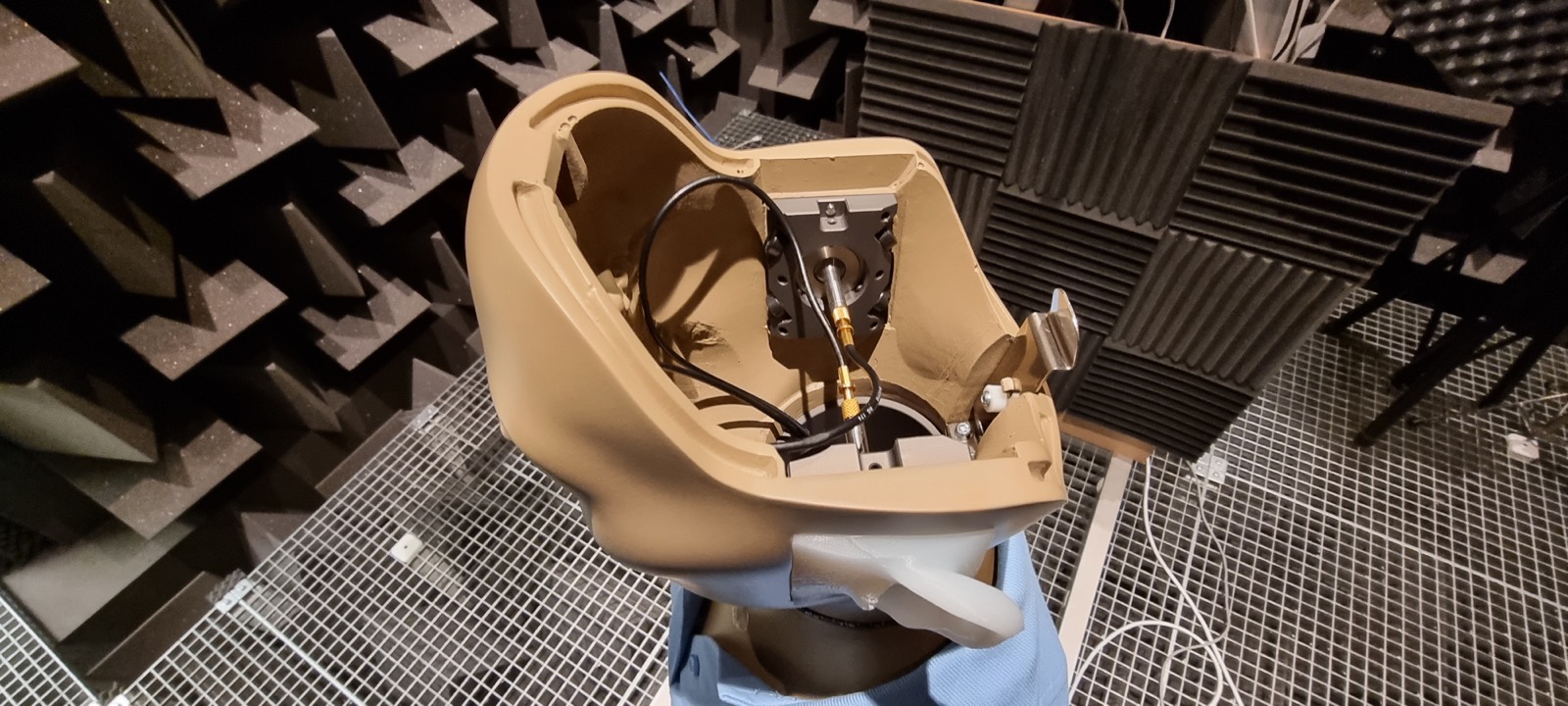
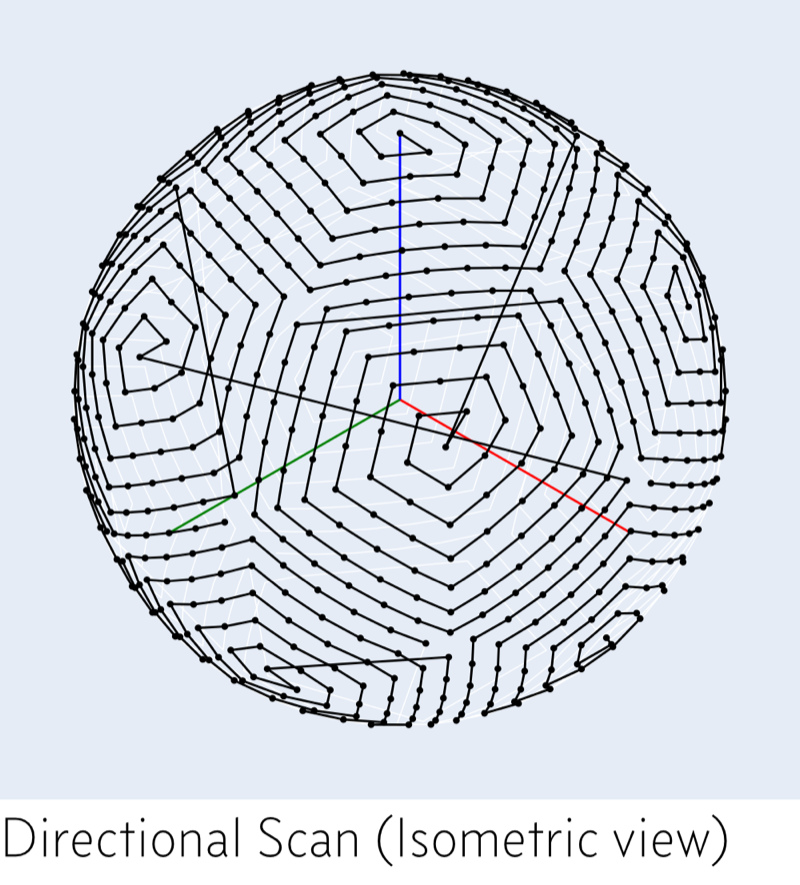
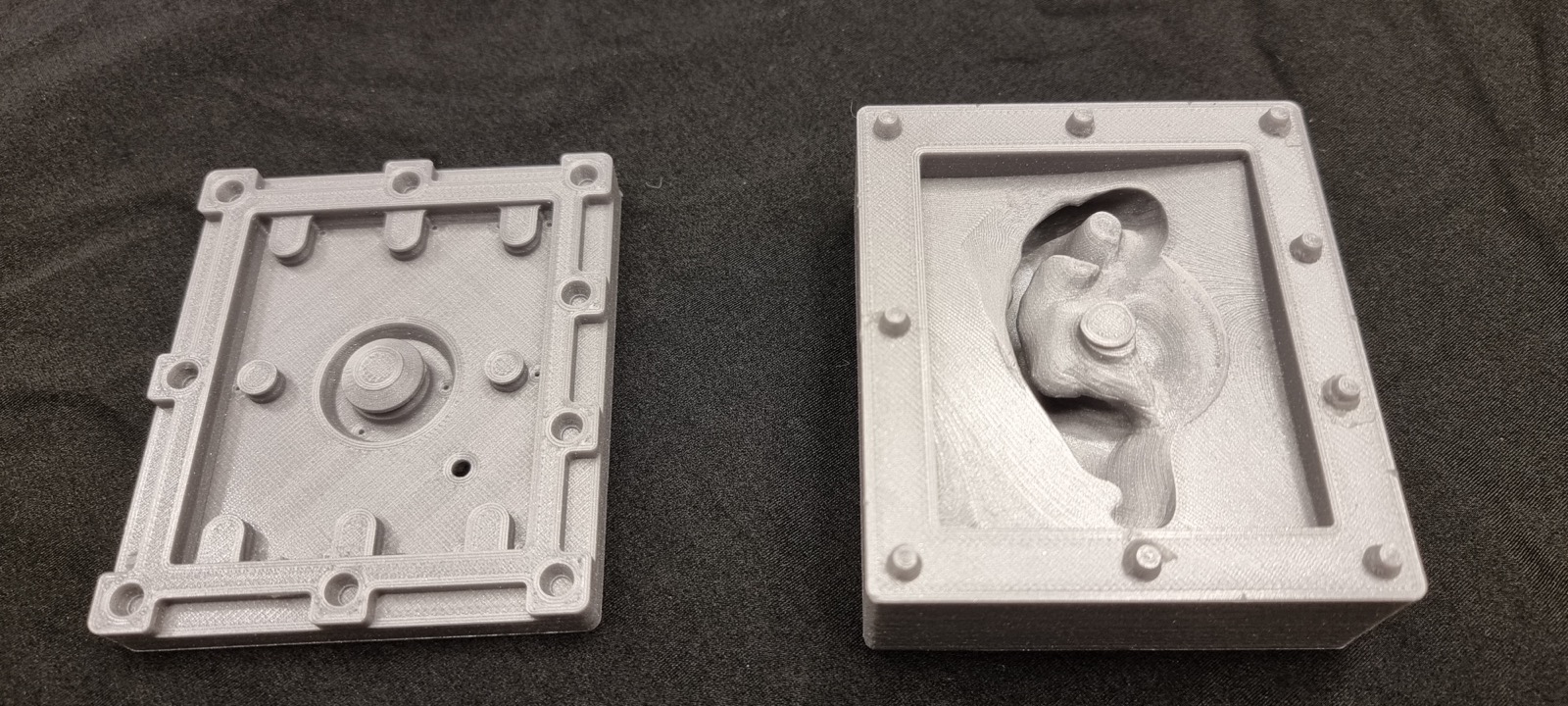
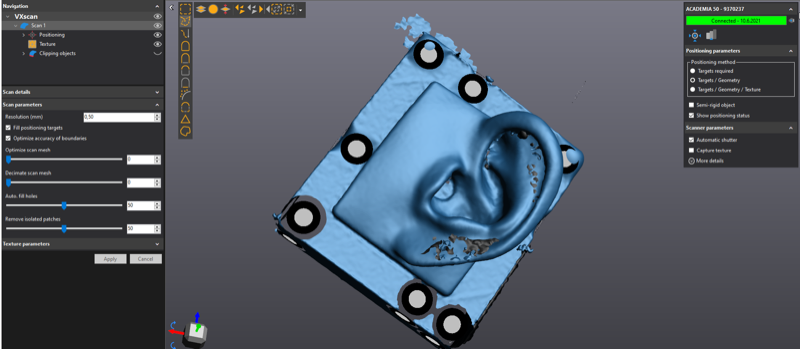
Synthetic pinna models and machine learning to personalise 3D sound.
Read more →
Structure-preserving model reduction achieving 100× speedup in wave simulation.
Read more →
Cross-modal foraging, visual synchrony effects, and haptic illusions.
Read more →

Sequential vibrotactile patterns achieve 93% recognition accuracy on the forearm — nearly four times the 26% seen with simultaneous stimulation. This finding shapes the core programming logic of every wearable device we build.
Read the paper →
We 3D-scan real pinnae, alter one geometric feature at a time, cast them in silicone, and measure their acoustic fingerprint. This controlled methodology lets us isolate exactly which part of your ear shape determines where you hear sound coming from.
Read the paper →
Our structure-preserving model order reduction compresses the wave equation into a low-dimensional form that runs 100 times faster than a full simulation — without sacrificing stability at complex material boundaries. Built with Treble Technologies.
Read the paper →





Our redesigned website is now live — featuring an overview of our research areas, team profiles, and a comprehensive publication...
Satish Bonthu's paper on structure-preserving model-order reduction for room acoustics has been published in the International Journal for Numerical Methods...
Mohammadmahdi Karimi's work on a forearm-based vibrotactile interface for transfemoral prosthetic feedback is now published.